conda env config vars set LD_LIBRARY_PATH="/home/cyl/miniconda3/envs/gsam/lib/python3.10/site-packages/nvidia/cuda_runtime/lib/:$LD_LIBRARY_PATH" conda env config vars set CPATH="/home/cyl/miniconda3/envs/gsam/lib/python3.10/site-packages/nvidia/cuda_runtime/include/:$CPATH" conda env config vars set CUDA_HOME="/home/cyl/miniconda3/envs/gsam/"
To find the correct path for CUDA_HOME use which nvcc. In my case, output of the command was:
1 2
>>> which nvcc /home/user/miniconda3/envs/py12/bin/nvcc
Threefore, I set the CUDA_HOME as /home/user/miniconda3/envs/py12/.
Note2: To find the correct path for LD_LIBRARY_PATH use find ~ -name cuda_runtime_api.h. In my case, output of the command was:
So I set the LD_LIBRARY_PATH as /home/user/miniconda3/envs/py12/targets/x86_64-linux/lib/ and CPATH as /home/user/miniconda3/envs/py12/targets/x86_64-linux/include/. If you have multiple CUDA installations, the output of find ~ -name cuda_runtime_api.h will display multiple paths. Make sure to choose the path that corresponds to the environment you have created.
... [I 2024-12-10 14:30:24.585 ServerApp] http://127.0.0.1:8080/lab?token=0061d1eb31396b1bc3cd77a7161b2084da1dedcdeca0600c [I 2024-12-10 14:30:24.586 ServerApp] Use Control-C to stop this server and shut down all kernels (twice to skip confirmation). [C 2024-12-10 14:30:24.603 ServerApp]
To access the server, open this file in a browser: file:///home/bohanfeng/.local/share/jupyter/runtime/jpserver-11659-open.html Or copy and paste one of these URLs: http://localhost:8080/lab?token=0061d1eb31396b1bc3cd77a7161b2084da1dedcdeca0600c http://127.0.0.1:8080/lab?token=0061d1eb31396b1bc3cd77a7161b2084da1dedcdeca0600c
I use a hyprland plugin called hyprscroller to emulate the scroll functionality of PaperWM. However, I can’t get whether I am in row mode or column mode, so I want to show the mode status on my waybar.
scroller_mode_listener.sh, responsible for listening the IPC message of hyprscroller and store that information in a tmp file. This script can be executed in hyprland config file using exec-once
The lua scripts in plugin/ will be executed automatically and the scripts in lua/ will be called when required
To let nvim load the plugin, use lazy.nvim. Add this line in your lazy.nvim configuration:
1
{ dir = "/home/cyl/nvim_plugins/ColorfulDiff.nvim/" },
Then this plugin will be loaded on start.
How To Use API
Use :Telescope help_tags or short hand <Ctrl-h> to open the help search panel. If I want to know the API regarding the highlight:
the function with `nvim_` as prefix are the nvim api. Press `Enter` to see the detailed description:
1 2 3 4 5 6 7 8
*nvim_buf_add_highlight()* nvim_buf_add_highlight({buffer}, {ns_id}, {hl_group}, {line},{col_start},{col_end}) Adds a highlight to buffer.
Useful for plugins that dynamically generate highlights to a buffer (like a semantic highlighter or linter). The function adds a single highlight to a buffer. Unlike |matchaddpos()| highlights follow changes to line numbering (as lines are inserted/removed above the highlighted line), like signs and marks do. ...
To use this api:
1
vim.api.nvim_buf_add_highlight(...)
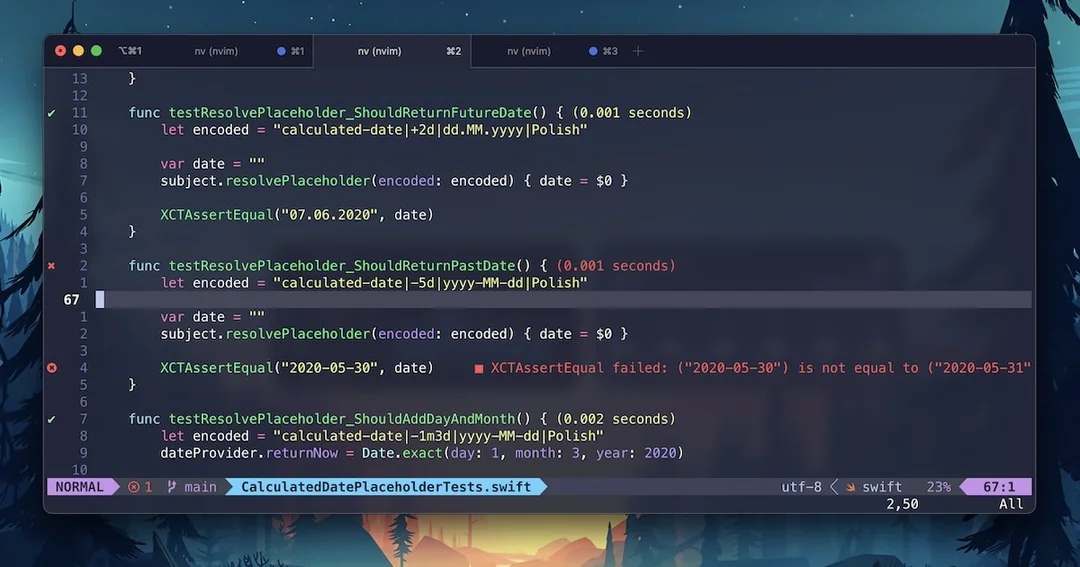
Test
Create a new folder called test And create the test lua file
Modify the required jdk version in file stm32cubemx.sh from exec archlinux-java-run --min 17 -- -jar /opt/stm32cubemx/STM32CubeMX "$@" to exec archlinux-java-run --min 17 --max 20 -- -jar /opt/stm32cubemx/STM32CubeMX "$@"
Then build and install the STM32CubeMX
1
makepkg --noconfirm --skipinteg -si
Since STM32CubeMX is not compatible with jdk22 (which is the default jdk that arch is currently using), you need to install jdk17 through yay -S jdk17-openjdk
Then you can start STM32CubeMX by running stm32cubemx, and hopefully, everything is fine.
Compiler
Use arm-none-eabi-gcc
1 2
yay -S arm-none-eabi-gcc yay -S arm-none-eabi-newlib
Debugger
Use OpenOCD to burn and debug STM32 through STLink v2 (the blue USB device provided by us).
1
yay -S openocd
Setup Your STM32 Project
Open your STM32CubeMX, follow the instruction of Lab1.pdf to configure your project.
NOTE: In Project Manage -> Project -> Project Settings -> Toolchain / IDE, use Makefile/CMake.
Generate the code and go to the project directory (with Makefile/CMakeLists.txt in the directory).
Then you need to generate the compile_commands.json for clangd to recognize the project.
Makefile
1
bear -- make
CMake
1
cmake -S ./ -B ./build
Build Project
Makefile
1
make
Then target binary file is ./build/<Project Name>.bin
CMake
1
cmake --build ./build
Then target binary file is ./build/<Project Name>.elf
Open On-Chip Debugger 0.12.0 Licensed under GNU GPL v2 For bug reports, read http://openocd.org/doc/doxygen/bugs.html Info : auto-selecting first available session transport "hla_swd". To override use 'transport select <transport>'. Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD Info : clock speed 1000 kHz Info : STLINK V2J37S7 (API v2) VID:PID 0483:3748 Info : Target voltage: 3.222587 Info : [stm32f1x.cpu] Cortex-M3 r1p1 processor detected Info : [stm32f1x.cpu] target has 6 breakpoints, 4 watchpoints Info : starting gdb server for stm32f1x.cpu on 3333 Info : Listening on port 3333 for gdb connections [stm32f1x.cpu] halted due to debug-request, current mode: Thread xPSR: 0x01000000 pc: 0x08000dc8 msp: 0x20005000 ** Programming Started ** Info : device id = 0x20036410 Info : flash size = 64 KiB ** Programming Finished ** ** Resetting Target ** shutdown command invoked
NOTE: In different Distro, the cfg file for OpenOCD may locate in different directories. You need to find it by yourselves.
By the way, if you use CMake
Note: When uploading binary file to STM32, it’s recommended to use .bin file instead of .elf file. Please use the following script to convert the .elf to .bin and upload.
To use segger ozone, you need a different linker called jlink (originally we use st-link v2). You need to buy this linker first (maybe on Taobao or Amazon).
Program File: select the binary file you have built (.elf is recommended).
Debug:
set some breakpoints and watch some variables of your interest. Press the green “power” icon on the upper left corner to start (upload the program and start the debugging process) Press the blue “play” icon besides “power” to continue.
A shell built-in command is contained in the shell itself (implemented by shell author) and runs on the same shell without creating a new process, e.g. cd, pwd, exit, alias.
By contrast: For a regular(linux) command, it is run from a binary file (found in $PATH or specified file) by forking the existing process in a subshell, e.g. ls, cat, rm.
How to implement
1. Judge whether is build-in command
Assume we have already got the parsed arguments
char * parsedArgs[MAXPARSE].
For example, a input char * input = "cd .." can be parsed as char * parsedArgs[MAXPARSE] = {"cd", ".."}
Then, we just need to judge whether parsedArgs[0] is contained in our build-in command set {"exit", "cd", "pwd" ...} (by using strcmp)
2. Implementation
In this project (as of milestone 2) , we need to implement exit, pwd, cd.
exit
In Bash, exit is a built-in command used to terminate the current shell session (same in our mumsh).
Each running shell is a process, so we can use the exit() in stdlib.h to terminate the shell process, achieving the goal of exiting the shell.
Running a crude (or minimal?) shell and have no idea where you are? Just type pwd and it will print the name of the current/working directory.
In C, we can implement the similar functionality using the getcwd() in unistd.h.
if success, getcwd() will return the pointer to the result, else ( e.g. no enough space) return NULL
1 2 3 4
voidexec_pwd(){ char buf[1024]; // memory space need for storage printf("%s\n", getcwd(buf,sizeof(buf))); }
However, the working directory is not guaranteed to be shorter than 1024, so we may need to dynamically allocate the buffer to suit the length.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
int size = 100; char *buffer = malloc(size);
while (getcwd(buffer, size) == NULL) { if (errno == ERANGE) { // buffer too small size *= 2; buffer = realloc(buffer, size); } else { // other error ... free(buffer); return1; } }
printf("%s\n", buffer);
free(buffer);
cd
cd is used for changing working directory.
In C, we can implement the similar functionality using the chdir() in unistd.h.
if success, chdir() will return 0, else ( e.g. no such directory) return -1
1 2 3
voidexec_cd(char * path){ chdir(path); }
Very straight forward, but if we want to implement more advanced features of the cd command such as changing to the home directory or the previous directory, we would need to handle these cases manually.
For example, you could check if the argument is ~ or -, and then call chdir() with the appropriate path