
项目框架
项目框架
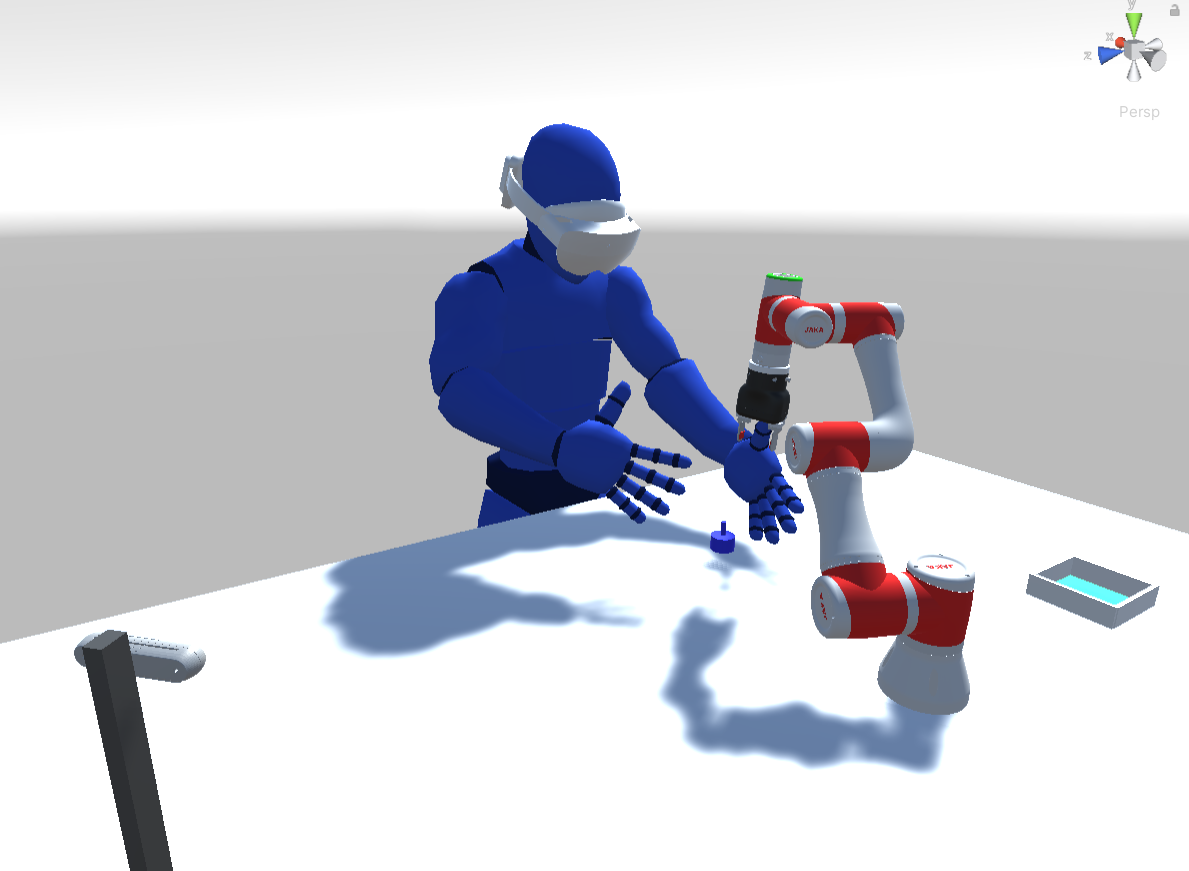
以下为项目布局示意图
(左下角为深度相机)
以下为项目的架构图
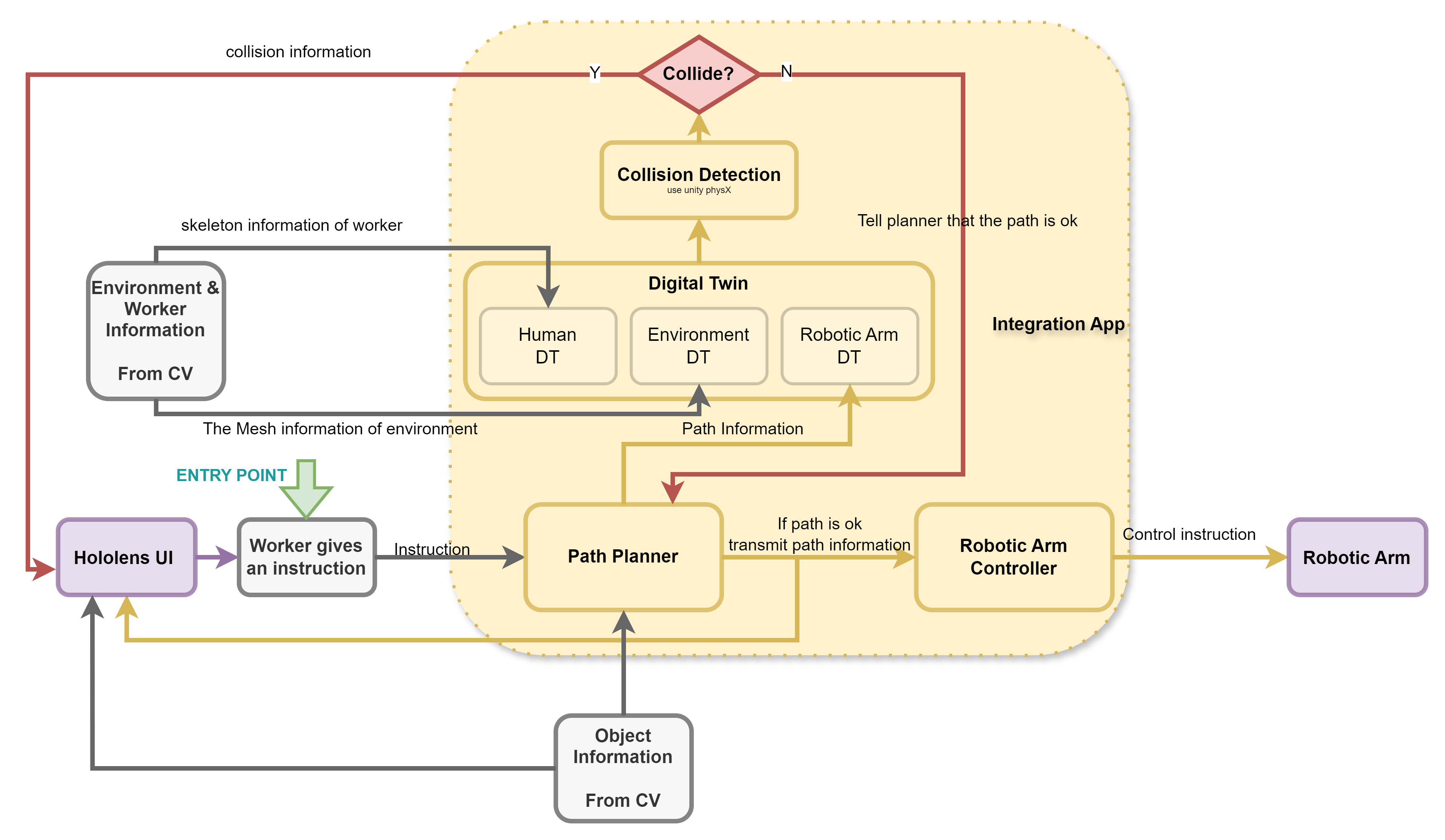
具体解释一下这张图
首先用户佩戴 hololens,hololens 会先把可交互的物体(物体数据源于物体检测算法)渲染在 UI 上,之后用户基于这些视觉信息,给出交互指令。
随后系统会根据给到的指令和可交互物体的信息,规划机械臂的运动路径。
路径信息会首先传到数字孪生系统中。该系统中有三部分孪生,分别是人体(实时数据来自人体检测算法),环境(实时数据来自 hololens 的环境感知系统) 和 机械臂(来自于前面提到的路径信息)的孪生。
随后该 DT 系统会根据路径信息解算在机械臂运动过程中是否会发生碰撞。
- 如果发生碰撞
- 会把碰撞发生的位发还给 hololens 显示,用户可以选择取消指令或者选择移走遮挡的物体()。
- 如果不发生碰撞
- 会把机械臂的预计运动轨迹发回给 hololens 显示,用于警戒用户。
- 将运动轨迹发给机械臂控制器,控制器控制机械臂运动。
- 如果发生碰撞

