
MotionGPT3 - Human Motion as a Second Modality
研究背景
文本(Text)是离散符号,动作(Motion)是连续信号,两者性质截然不同。现有方法面临两个核心矛盾:
- 量化误差(Quantization Error):将动作离散化为 VQ 码本索引以适配 LLM 的 next-token prediction,会引入近似误差,衰减高频细节,破坏语义-物理一致性
- 跨模态干扰(Cross-Modal Interference):在单流(Single-Stream)骨架中混合文本与动作 token,梯度相互拉扯,导致训练不稳定、收敛慢
研究目标
提出一个统一的动作-语言模型,同时支持:
- Text-to-Motion(T2M):文本描述 → 生成动作
- Motion-to-Text(M2T):动作序列 → 生成文本描述
且需要避免量化误差,减少跨模态干扰。
核心概念
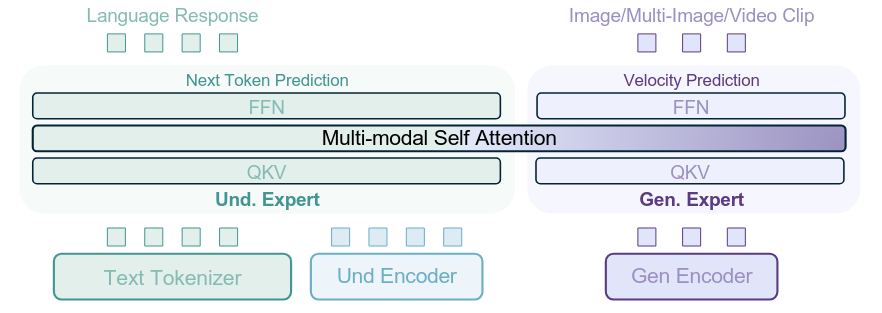
Mixture-of-Transformers(MoT)
来自 Liang et al. (2024) 的思想:为每个模态配备独立的 Transformer 分支,各自拥有独立的 Embedding、FFN 和 LayerNorm,仅在 Self-Attention 层共享。这样:
- 各模态保留自身的归纳偏置(Inductive Bias)
- 跨模态信息仅通过 Attention 受控交换
- 新增模态只需新增分支,无需重训全部参数
连续动作表示(Continuous Motion Representation)
使用预训练的 Motion VAE 将动作编码为连续 latent 向量(而非 VQ 离散索引),避免量化误差。
研究方法
整体架构
1 | Motion VAE Bimodal LLM Motion VAE |
1. Motion VAE
- 来自 Xin et al. (2023)(MLD)
- Encoder $\mathcal{E}$: 将 $N$ 帧动作 $m^{1:N}$ 编码为单个 latent $z \in \mathbb{R}^{256}$
- Decoder $\mathcal{D}$: 将 latent $z$ 解码回动作序列
- 训练目标:重建损失 + KL 正则
- 预训练后冻住,不参与后续训练
- 动作长度信息隐式编码在 latent 中,Decoder 可生成变长输出
2. 双分支 Bimodal Transformer(MoT 架构)
两个并行分支,基于 GPT-2 配置(12 层,维度 768,MLP 维度 3072):
| 组件 | Text Branch $\mathcal{T}$ | Motion Branch $\mathcal{M}$ |
|---|---|---|
| 初始化 | 预训练 GPT-2(124M) | 从零训练(238M) |
| Embedding | 文本 Embedding | 独立 Motion Embedding |
| FFN | 独立 | 独立 |
| LayerNorm | 独立 | 独立 |
| Self-Attention | 共享 | 共享 |
路由机制:硬路由(非学习),由特殊标记决定——
<som>/<eom>界定动作边界<motion_in>/<motion_out>标记 I/O 位置- 文本 token($\vartheta_i = 0$)→ Text Branch
- 动作 token($\vartheta_i = 1$)→ Motion Branch
3. 动作接口模块
由于动作是连续信号,不能复用文本的 Embedding lookup 和 softmax 解码,需要专用接口:
- MUH(Motion Understanding Head):线性投影,将 VAE latent 映射到 Transformer 输入空间(理解任务)
- MGH(Motion Generation Head):即 Diffusion Head $\mathcal{H}$,将 Transformer 隐状态映射回 VAE latent 空间(生成任务)
4. Diffusion Head $\mathcal{H}$
轻量级扩散模型(3 层 MLP + ResBlock,隐藏维度 1024),在 VAE latent 空间中做去噪:
$$\mathcal{L}{\text{diff}} = \mathbb{E}{z_0, t, \epsilon}\left[|\epsilon - \mathcal{H}(z_t, h_m)|_2^2\right]$$
- 训练时:对 $z_0$ 加噪得 $z_t$,$\mathcal{H}$ 以 Motion Branch 隐状态 $h_m$ 为条件,学习预测噪声 $\epsilon$
- 推理时:插入 $K$ 个
<motion_out>占位 token,Motion Branch 输出 $h_m^{v:v+K}$,$\mathcal{H}$ 从纯噪声 $z_T$ 逐步去噪(默认 100 步)得到 $\hat{z}_0$,再由 VAE Decoder 解码
训练策略:三阶段对齐
Stage I: Text-to-Motion 预训练
- 冻住 Text Branch $\mathcal{T}$
- 只训练 Motion Branch $\mathcal{M}$ + Diffusion Head $\mathcal{H}$
- 任务:T2M(文本→动作生成)
- 目的:让 $\mathcal{M}$ 在稳定的语言条件下学会动作语义
- 100k iterations
Stage II: 跨模态对齐(Cross-Modal Alignment)
- 仍冻住 $\mathcal{T}$
- 引入多任务:T2M + M2T + Motion Prediction
- 以指令格式呈现,促进双向对齐
- 300k iterations
Stage III: 联合微调(Joint Fine-Tuning)
- 解冻 $\mathcal{T}$,全参数微调
- 混合文本-动作配对数据 + 纯文本数据
- 50k iterations
主要发现
双流 vs 单流
- 双流架构收敛速度约为单流的 2 倍(训练损失)
- 验证指标(R@3, MMDist)收敛快 4 倍
- 相同损失水平下,双流模型质量更优
连续 VAE vs 离散 VQ
- VQ 方案在 R@3 约 0.5 时即饱和(天花板低)
- VAE 连续表示持续改进,最终质量显著更高
实验结果
在 HumanML3D 上:
- T2M:R@3 = 0.837,MMDist = 2.725,达到 SOTA
- M2T:BertScore = 35.231,超越现有统一模型
讨论
优势
- 避免 VQ 量化误差,保留高频运动细节
- 双分支设计减少梯度干扰,加速收敛
- 三阶段训练抑制跨任务干扰
- 仅需 2 张 3090,训练高效
局限性
- VAE 输出单个 latent,不支持长动作的分段组合生成
- 方向性控制(左/右)有时会失败
- 泛化能力受限于数据覆盖范围
与其他多模态架构的对比
| 架构类型 | 路由方式 | 代表 | 特点 |
|---|---|---|---|
| 单流 + Projector | 无路由,全拼接 | LLaVA, Qwen-VL | 简单,但有跨模态干扰 |
| MoE | 学习的 Router, TopK 选专家 | Mixtral, Switch Transformer | 动态路由,扩展性好 |
| MoT / 双分支 | 按模态硬路由,共享 Attention | MotionGPT3 | 隔离前馈,受控交互 |
未来方向
- 分层/分段 latent:用 hierarchical 或 segment-wise latent 表示支持长动作和组合生成
- 更大数据集和更强 LLM:扩展训练规模,评估效率和鲁棒性
- 局部语义对齐:支持段级别的文本-动作精细对应
参考文献
- Zhu, B., Jiang, B., Wang, S., et al. (2025). MotionGPT3: Human Motion as a Second Modality. arXiv:2506.24086.
- Xin, T., et al. (2023). MLD: Motion Latent Diffusion.
- Liang, C., et al. (2024). Mixture-of-Transformers (MoT).
- Radford, A., et al. (2019). GPT-2.

