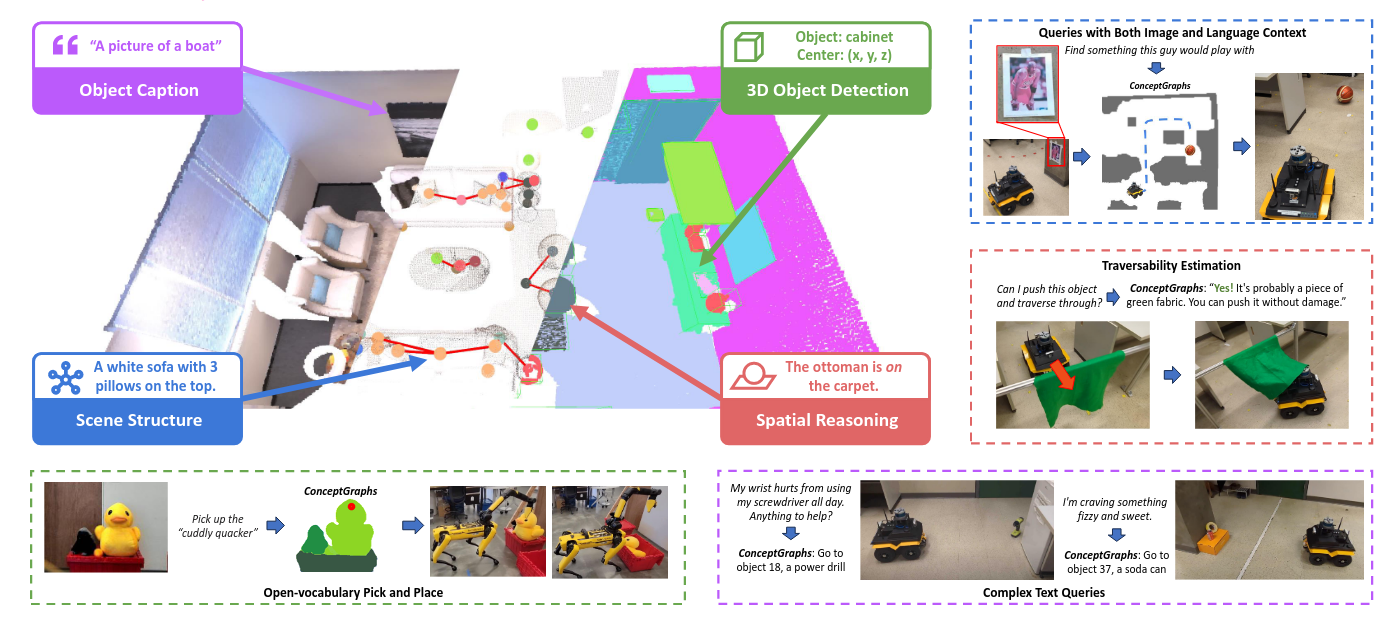
ConceptGraphs= Open-Vocabulary 3D Scene Graphs for Perception and Planning
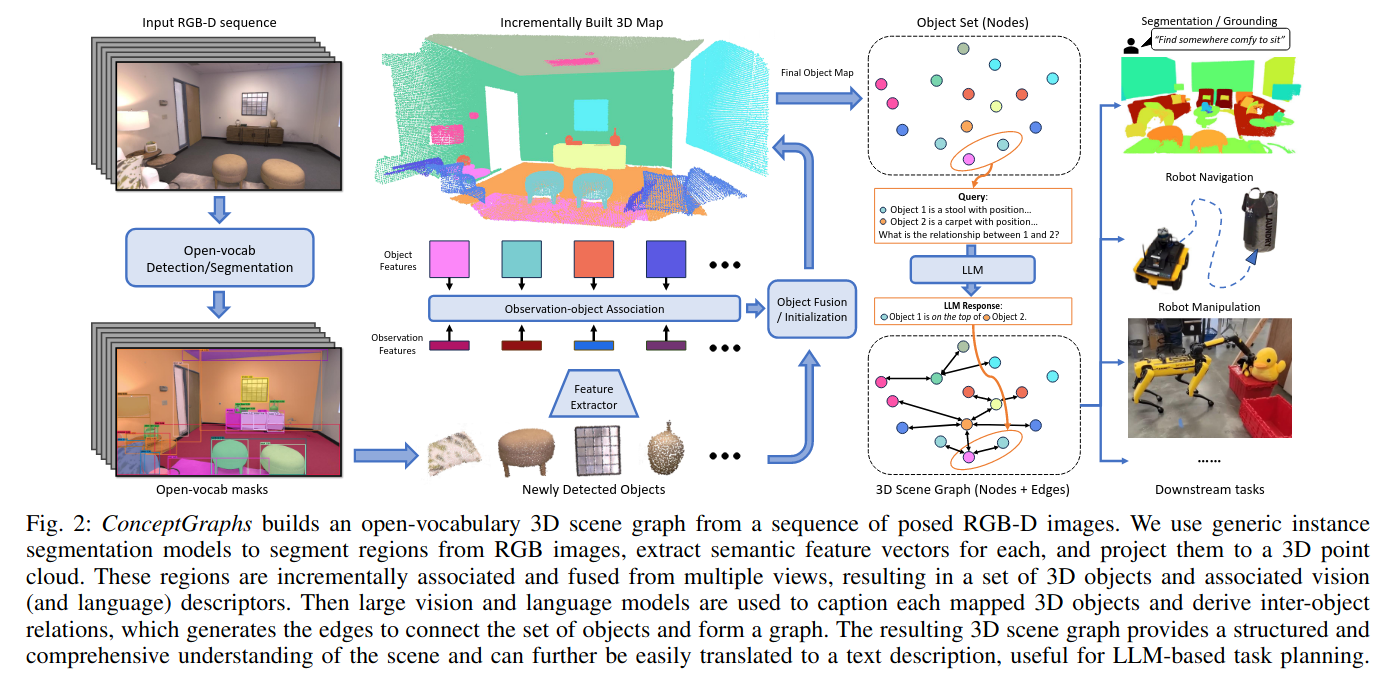
通过LLM来判断位置关系,以此构建scene graph
还是只能判断object-level空间关系,做不了part-level manipulation
ConceptGraphs= Open-Vocabulary 3D Scene Graphs for Perception and Planning

通过LLM来判断位置关系,以此构建scene graph
还是只能判断object-level空间关系,做不了part-level manipulation
ConceptGraphs= Open-Vocabulary 3D Scene Graphs for Perception and Planning

