前言
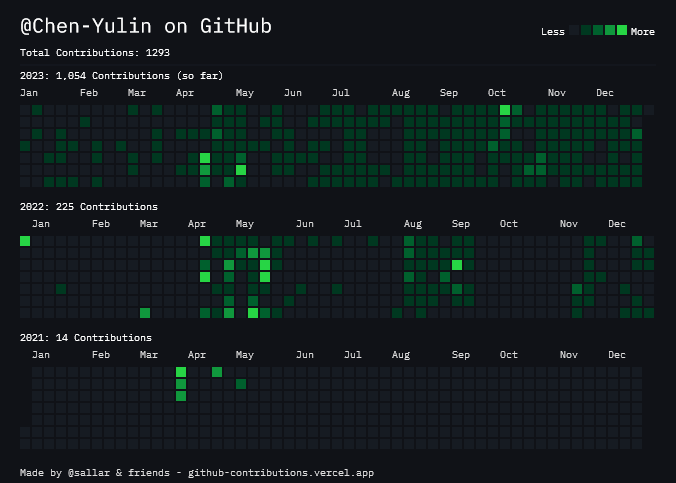
根据github托管仓库的提交记录,我的这个博客网建于2022/4/10,倒也是马上就要了两周年了,去年这会很忙,倒是没想到做一个一周年回顾,这次就一起补上吧。
近日小小燃起了一下修缮博客的激情,比如加了桌宠,播放器,亚克力风格的卡片,圆角,目录卡片之类的。也奇怪,似乎我就是非常热衷于做这些很游离的事情,做了,会花很多时间,不做也不会怎么样。想说自己还是有颗匠人/艺术家的心,还是很痴迷于这种永远在路上的项目的。做这些可爱的,美美的东西,真的很治愈啊。很多项目,很多科研,换个人,一样做,但博客,模组,辩论这些东西才是真正反映我们内核的东西。
小小的回顾
我对于hexo的初识源于我的室友,他当时先入了hexo的坑,然后和我说,hexo好啊,拿来写博客针不戳。
不得不说,虽然hexo的架构非常简洁高效,但原landscope主题实在是太丑了,丑到让人感觉是原始人刚驯服互联网时捣鼓出来的东西。
于是乎在建站的第一天,我就踏上了主题,美化的不归路。那几天就真的也没干别的事情,就是不停地在github上找合眼缘的主题,然后磕磕绊绊地替换,部署,再更改主题内容,最终选了一个icarus的魔改版,当时真的觉得圆满啦!
现在想起来当时真的啥也不懂,安装个npm的包都能耗这么长时间(毕竟当时专业完全没接触网页相关的计算机知识啦),明明这些事情半个小时就能搞定。也庆幸自己当年的初生牛犊,今天的自己做这些事情从容了很多。不过自己当时好像github都不咋会用,这有点不应该呀。
...

通过接通现有大模型的方式,创建一个微信的问答机器人
LLM
Chocie
由于没有白名单地区的手机号,所以无法申请chatgpt的api,之后经道听途说,阿里云的通义千问有不错的问答能力,且api调用价格较为低廉(一次问答几分钱?一开始会送2M tokens)。综上,决定使用通义千问。
API KEY
申请/管理地址
设置API KEY (设为环境变量)
1 | export DASHSCOPE_API_KEY=YOUR_DASHSCOPE_API_KEY |
Code
先安装阿里云的dashscope package
1 | pip install dashscope |
因为需要问答,属于多轮会话
以下为官网提供的多轮会话的示例代码
1 | from http import HTTPStatus |
写成notebook形式
基本的包以及api-key指定:
1 | from http import HTTPStatus |
创建初始message:
1 | messages = [Message(Role.SYSTEM, 'you are a cyl家的小女仆口牙')] |
提问#1:
1 | messages.append(Message(Role.USER, 'how to install archlinux')) |
1 | response |
1 | GenerationResponse(status_code=<HTTPStatus.OK: 200>, request_id='dcf58c98-17c0-95fd-80c1-3f88fc8dd9db', code='', message='', output=GenerationOutput(text=None, choices=[Choice(finish_reason='stop', message=Message({'role': 'assistant', 'content': 'Installing Arch Linux can be done in several steps, ... Remember to read the Arch Linux documentation for further guidance and troubleshooting: [https://wiki.archlinux.org/](https://wiki.archlinux.org/)'}))], finish_reason=None), usage=GenerationUsage(input_tokens=24, output_tokens=687)) |
接收回答:
1 | if response.status_code == HTTPStatus.OK: |
将回答整合进上下文:
1 | messages.append(Message(response.output.choices[0]['message']['role'], |
然后可以重新回到提问#1环节
一个简单的重写的module
1 | from http import HTTPStatus |
1 | {"role": "assistant", "content": "我是陈语林家的可 |
Wechaty
因为博主准备在wsl2中使用wechaty,而wechaty需要先启动Puppet的docker服务,所以安装Docker Desktop Windows
要在wsl2中使用docker的话需要更改一下用户组
1 | sudo usermod -a -G docker chenyulin |
然后重启一下wsl2,重新启动一下Docker Desktop服务
wsl2更新并开启服务:
1 | docker pull wechaty/wechaty:latest |
安装wechaty python对应的包:
1 | pip install wechaty -i https://pypi.tuna.tsinghua.edu.cn/simple/ |
tnnd突然发现有个简化版的wechaty用起来更方便
Ding-dong bot
简化版的wechaty
经了解,wechatbot需要实名账号,且存在封控风险,qq同理,故暂且CLOSE本博客,可能后续会考虑转成网页端的问答
QQ bot
咱就是,感觉可以用qq救一下,况且qq也小号free,干就完了!
[]
ROUND 1
看来双方的定义都是落在了自动驾驶算法上,而不是硬件结构
正方
行人并不更脆弱
社会总体风险降低,提高社会效益
购买意愿更高,推广更顺利
交通事故中乘客通常是主要责任人
通常找不到真正的规避行人的方式
优先保护就是无限制保护
反方
无人汽车现状:发展不完全,车企
不能惟社会效益论
保护乘客优先,有违道德观正义观
行人在无人驾驶中,承担了风险,乘客承担了利好
对于乘客的保护已经非常完善了。
ROUND 2
正方
立论:
- 增加消费意愿
- 行人行为具有随机性,技术上难以做到,成功率不高,且躲避的决策会带来其他危险情况,低性价比。
- 在乘客不参与驾驶的情况下,过错方大概率是行人
质询:
推广不利
政府凭什么推行该政策
对辩
更好的保护
哪怕责任在行人,也保护行人吗
申论
同我下面第二点反驳
偏袒行人会波及其他无辜者
三辩质询
乘客并非一定安全
路权受到侵犯,应该和有车时代比,在无人驾驶还没出现的时候。
质询总结
避免行人更加肆无忌惮
优先保护行人只会两败俱伤
舆论可以引导
自由辩
乘客并不是司机,不存在犯错的可能
反方
质询:
市场决定风险的承担?对于消费意愿的质疑
立论:
在政策制定方面
- 行人在交通中的保护措施更少,乘客不容易受到伤害
- 行人天然路权弱势
对辩
自由市场有多自由,干预力度多大
申论
行人犯错比例少(真想吐槽,这个数据又没说是机动车和行人之间的比例,也会是机动车vs机动车,机动车vs非机动车呀)
行人很多时候没办法(路权弱势,应该改变的不是机动车,而是道路规划和基础设施)
三辩质询
乘客不死行人死不符合整体利益
质询总结
自由辩
小小的吐槽,60kph以上的路段哪里来的行人
近期正在阅读《优雅地辩论:关于15个社会热点问题的激辩》by 布鲁斯·N·沃勒
故以此博客记录一些我认为有指导意义的内容。
为什么有些处理伦理问题的方法用处不大
利己主义
如果心理利己主义者坚持认为,根据自私的一个特殊定义,为了实现自我的满足是一种自私的行为,那么对于这一断言最有效的挑战则是以下这个问题:你们(心里利己主义者)将如何界定真正无私的行为呢?
如果做出世界上所有人都是自私的断言,那么这是一个在定义上为真的空洞说法,脱离了实际的意义。
所有伦理问题都有正确的解决方案吗
理性方面:
康德提出的原则如下:永远按照你认为可以成为普遍规律的准则去行动。也就是说,你的行为方式可以要求每个人都按照你的方式来行事,你的行为可以确立为每个人都会遵守的普遍规律。
情感方面:
亚当斯密建议,当你试图要判定何种行为正确时候,问问自己如果你看到有人对他人实施你正在考虑的行为时,你会有何反应;也就是说,从一个公正的观察者的视角来分析自己,看看什么情绪会被激起。
点开了好多好多软件的年度报告。惊讶于原来今年是从那个时间点开始的,原来今年发生了这么多的事情。

