DETR是一个使用transformer作为基本架构的 object detection 模型。

DETR是一个使用transformer作为基本架构的 object detection 模型。
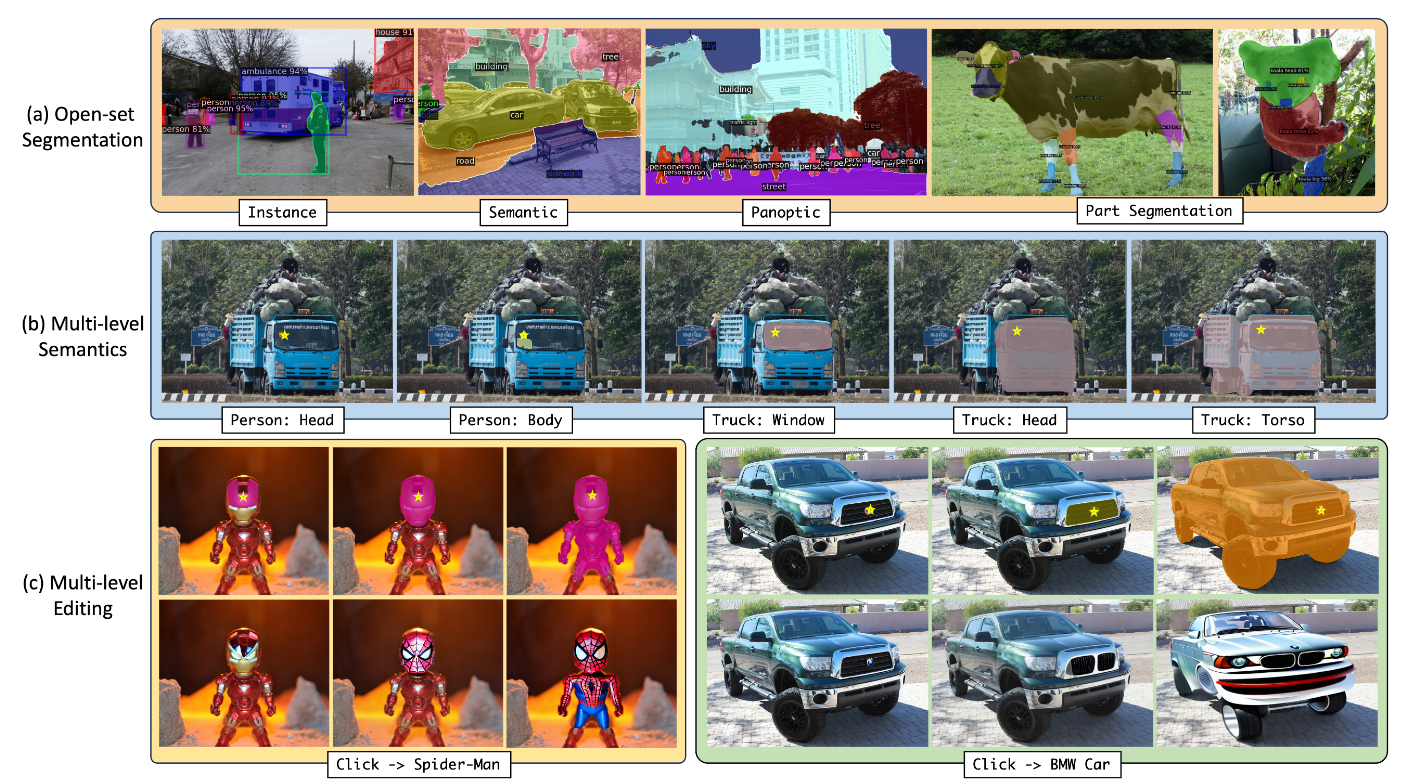
这片文章可以成为场景物理重建的基石之一
类似的后续工作有OMG-Seg
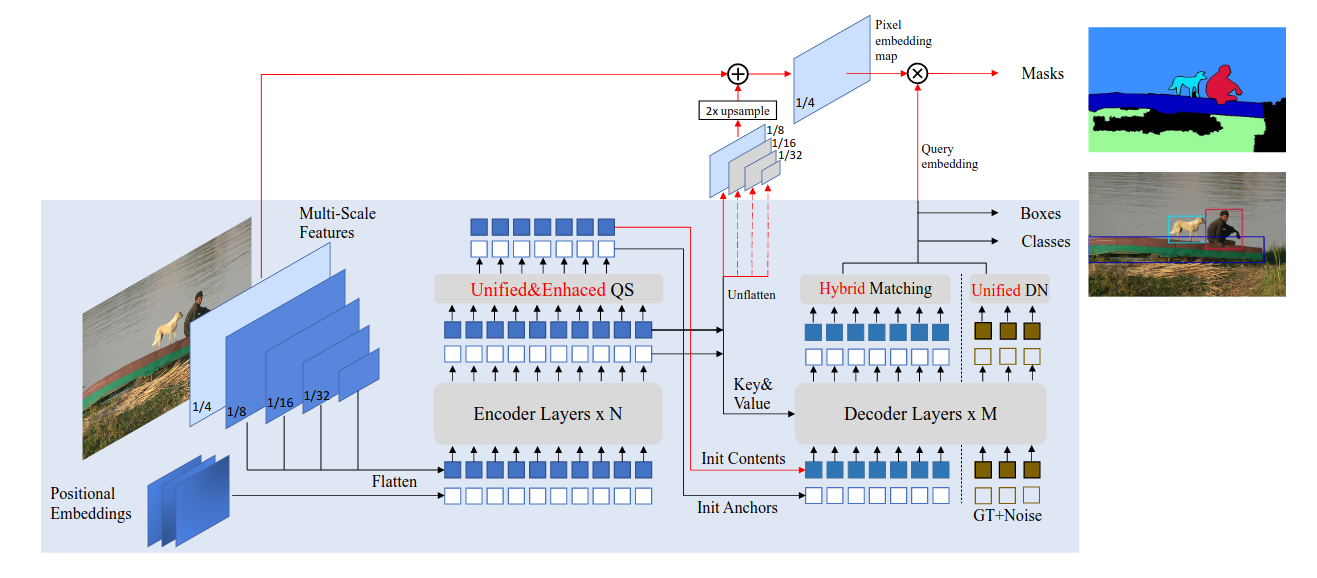
注:此DINO并非自蒸馏自监督的那个[[DINO]],而是派生自[[DETR]]
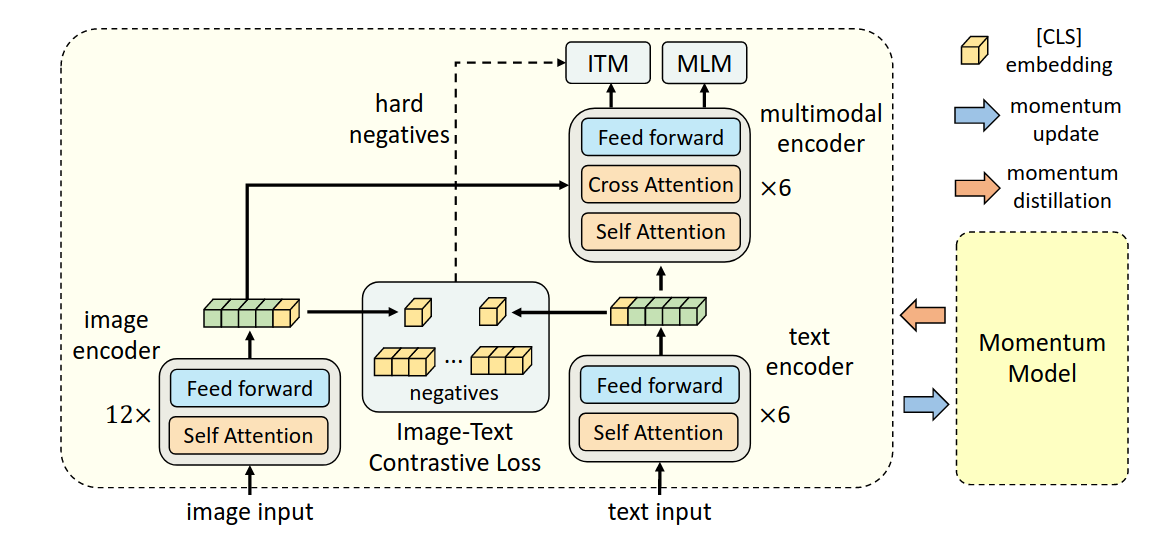
使用的backbone是BERT(通过MLM训练)
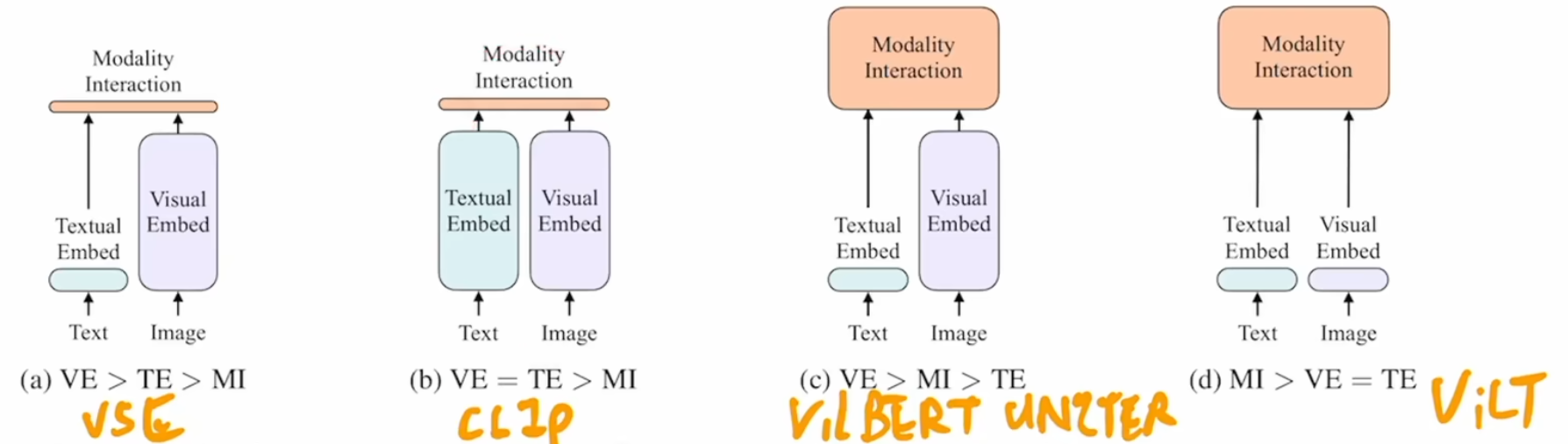
该研究认为,image encoder的模型大小应该大于text encoder,所以在text encoder这里,只使用六层self attention来提取特征,剩余六层cross attention用于multi-modal encoder。

A vision-language model that unifies vision-language understanding and generation tasks.
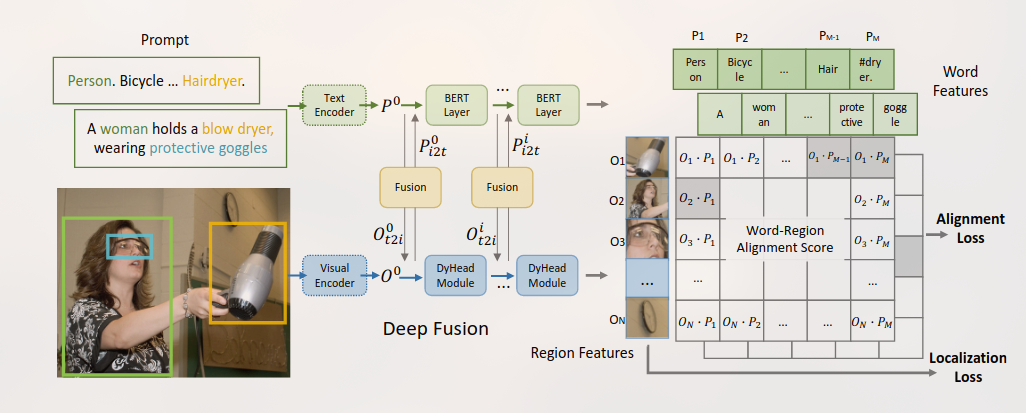
GLIP是一个学习了object-level, language-aware, and semantic-rich visual representations 的模型。
统一对象检测和短语接地进行预训练。

将不同帧$X_t$中的特征集合在M中特征点的公式: