Posted 2024-10-29Updated 2026-04-07Reviewa few seconds read (About 18 words)Human-robot interaction for robotic manipulator programming in Mixed Reality 和我毕设很像的工作,居然已经发ICRA了? #RoboticsResearch-paperRobotLearningMR/ARHRI
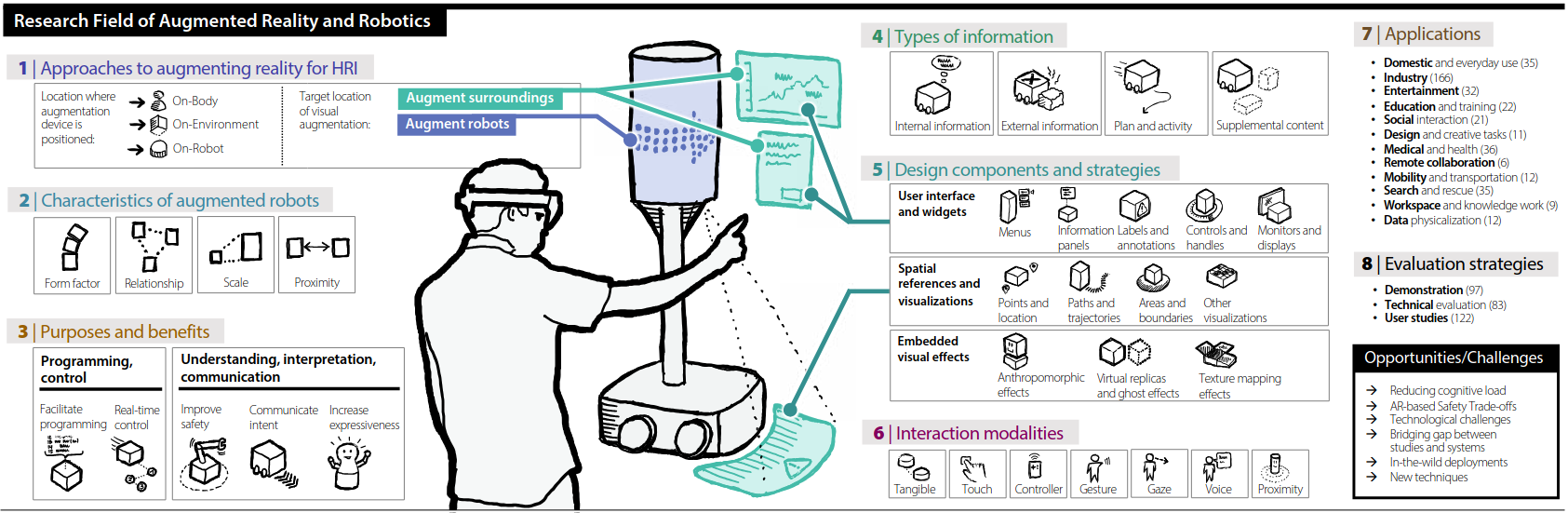
Posted 2024-10-28Updated 2026-04-07Review7 minutes read (About 1119 words)Augmented Reality and Robotics - A Survey and Taxonomy for AR-enhanced Human-Robot Interaction and Robotic Interfaces虽然近些年有关AR在人机交互方面应用的研究有很多,但是这些研究大都缺少系统性的分析#RoboticsResearch-paperSurveyMR/ARHRI