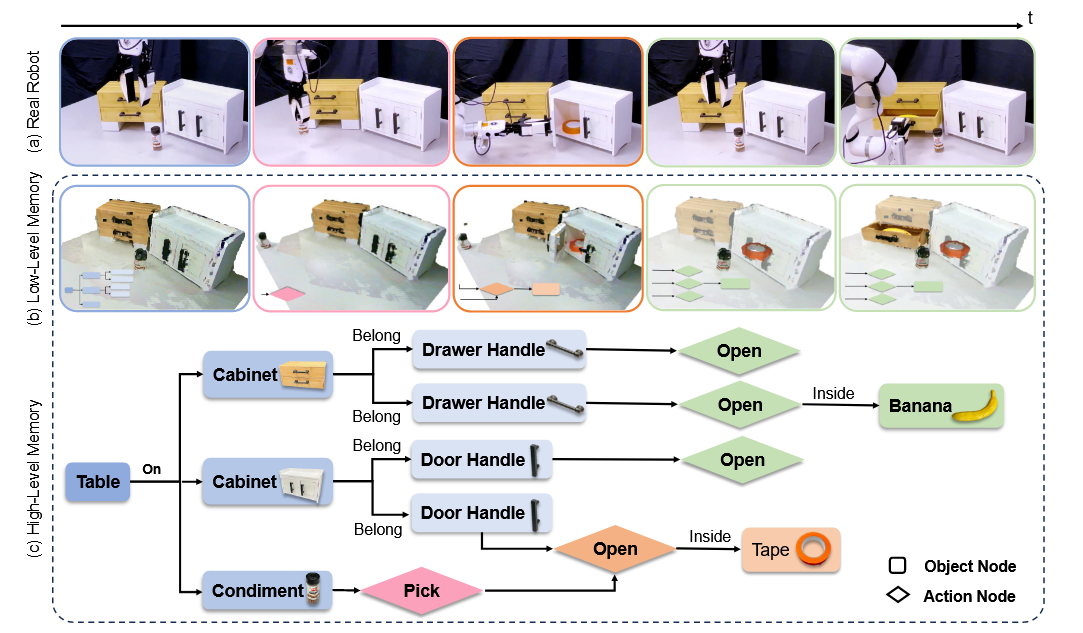

(Mindmap) Part-level Scene Understanding for Robots
 Part-level Scene Understanding for Robots/Pasted_image_20250414142333.png)
A scene graph is a structural representation, which can capture detailed semantics by explicitly Modeling:

ConceptGraphs= Open-Vocabulary 3D Scene Graphs for Perception and Planning
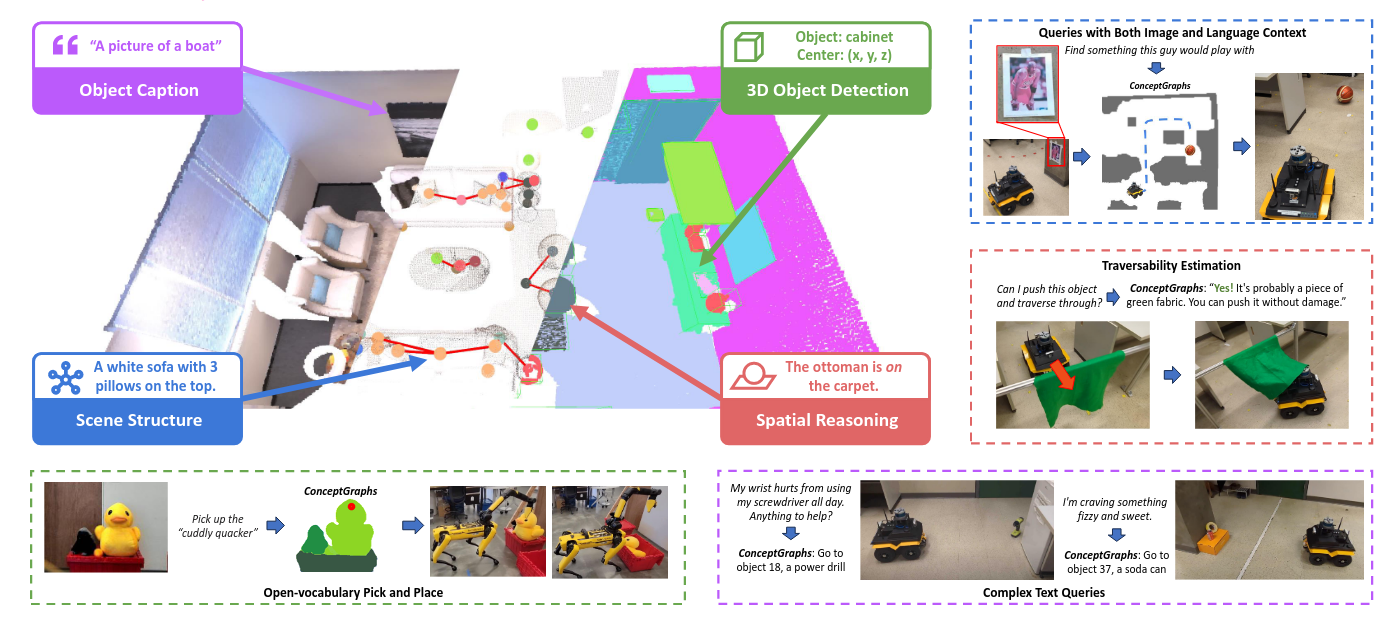
通过LLM来判断位置关系,以此构建scene graph
SayPlan= Grounding Large Language Models using 3D Scene Graphs for Scalable Robot Task Planning
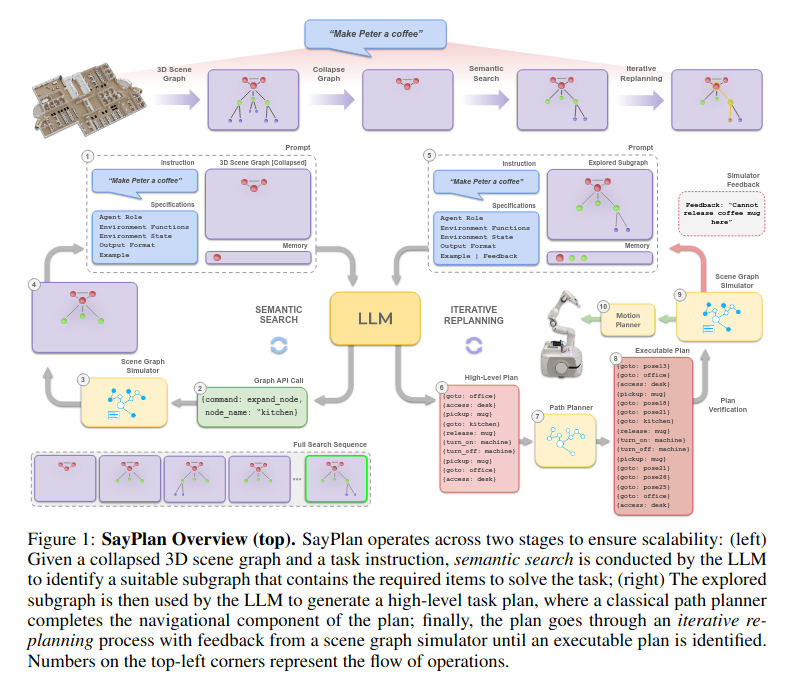
主要的思想都在上面这个伪代码里,通过只展开部分场景图(严格层级结构),来控制输入llm的场景图大小。
Representation Learning for Scene Graph Completion via Jointly Structural and Visual Embedding
 Representation Learning for Scene Graph Completion via Jointly Structural and Visual Embedding/Pasted_image_20250318162533.png)
The architecture of RLSV is a three-layered hierarchical projection that projects a visual triple onto the attribute space, the relation space, and the visual space in order.
Factorizable Net= An Efficient Subgraph-based Framework for Scene Graph Generation

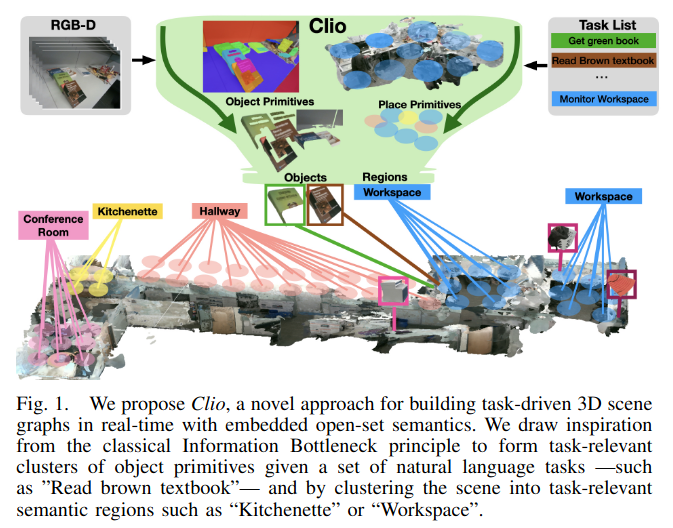
我的想法是将场景进行panoptic segmentation 之后再在每个物体上进行hierarchical part relation detection,异曲同工。

 Contextual Translation Embedding for Visual Relationship Detection and Scene Graph Generation/Pasted_image_20250318160643.png)
 Visual Translation Embedding Network for Visual Relation Detection/Pasted_image_20250318155431.png)

