
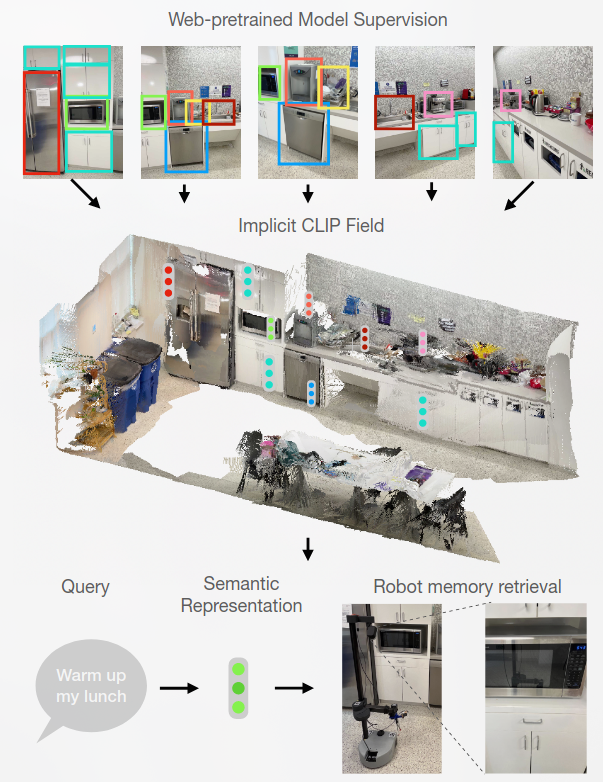
CLIP-Fields- Weakly Supervised Semantic Fields for Robotic Memory
疑问:

OK-Robot- What Really Matters in Integrating Open-Knowledge Models for Robotics

Creating a general-purpose robot has been a longstanding dream of the robotics community.
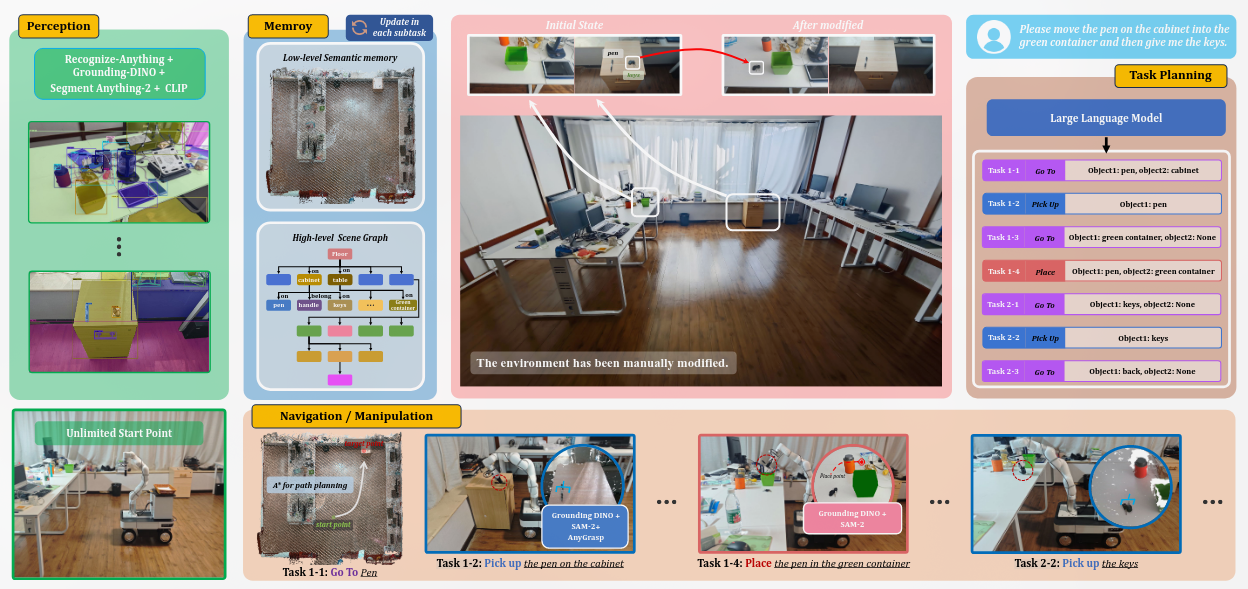
Dynamic Open-Vocabulary 3D Scene Graphs for Long-term Language-Guided Mobile Manipulation
和我的想法非常相近,完成度也很高啊喂。可以参考他的实现思路,引用的文章等等。

