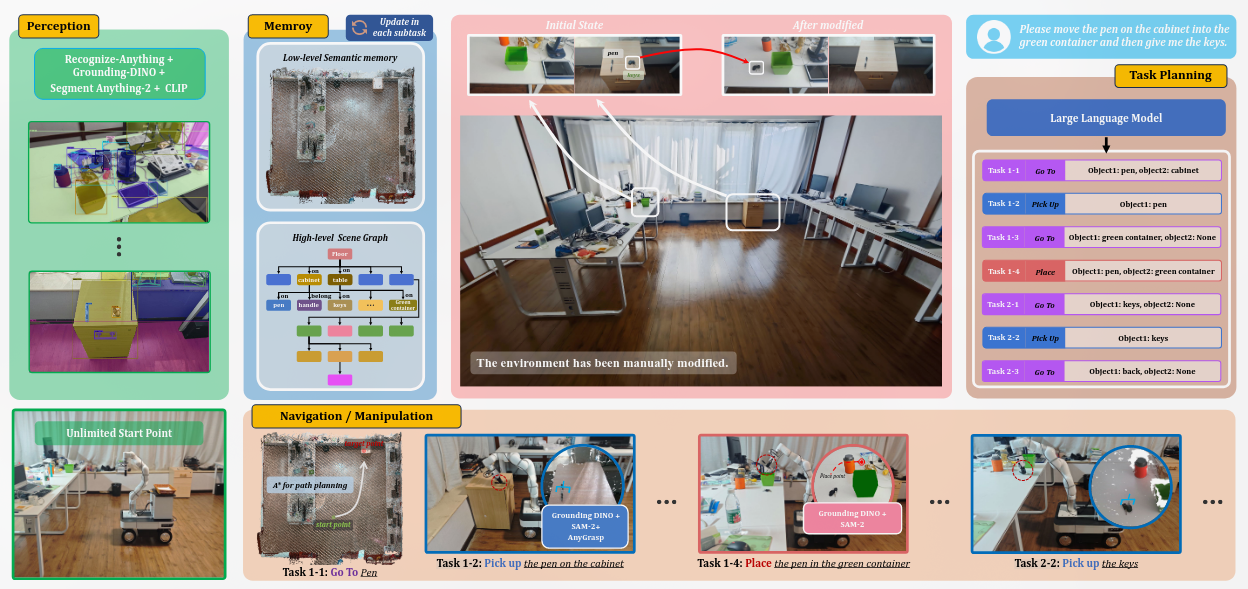
Posted 2024-12-17Updated 2026-03-30Reviewa few seconds read (About 42 words)Dynamic Open-Vocabulary 3D Scene Graphs for Long-term Language-Guided Mobile Manipulation和我的想法非常相近,完成度也很高啊喂。可以参考他的实现思路,引用的文章等等。#RoboticsScene-graphResearch-paperLLMCVReconstruct3D-SceneEmbodied-AISemanticOpen-Vocabulary